Robotics System Toolbox – Trajectory Generation and Following: https://www.mathworks.com/help/robotics/trajectory-generation.html
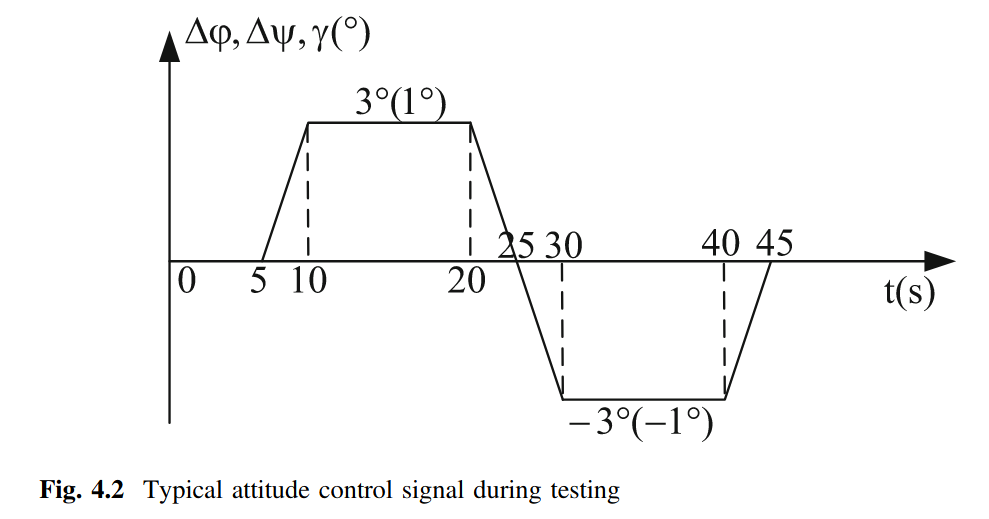
想要透過 Matlab 產生一組像下圖這樣一組姿態的角速度軌跡:
這是一個 Trajectory Generation / Trajectory Planning 的問題,可以參考 Standford Introduction to Robotics 的 Lecture 10 Trajectory Planning 的介紹。
Matlab 可以透過 Robotics System Toolbox 的 Trajectory Generation and Following 產生相關的軌跡。
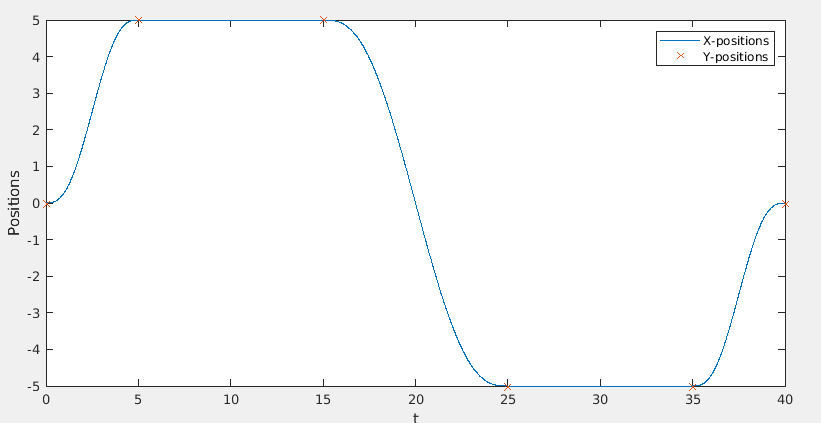
以下以 Matlab 透過五階多項式產生上述的軌跡:
|
1 2 3 4 5 6 7 8 9 10 11 12 |
wpts = [0, 5, 5, –5, –5, 0]; tpts = [0, 5, 15, 25, 35, 40]; tvec = 0:0.01:40; [q, qd, qdd, pp] = quinticpolytraj(wpts, tpts, tvec); plot(tvec, q) hold all plot(tpts, wpts, ‘x’) xlabel(‘t’) ylabel(‘Positions’) legend(‘X-positions’,‘Y-positions’) hold off |
又,或可以 rottraj 產生姿態軌跡。
Leave a Reply